
Impressum
Jimdo GmbH
Stresemannstr. 375
22761 Hamburg
Germany
Achtung: Kein telefonischer Kundenservice! Einfach dem Jimdo-Team eine Nachricht senden.
Tel.: +49 40 - 8 22 44 997
Fax: +49 40 - 8 22 44 998
Vertretungsberechtigte Geschäftsführer:
Fridtjof Detzner, Matthias Henze, Christian Springub
Registergericht: Amtsgericht Hamburg
HRB 101417
Ust. IdNr.: DE814864138
Allgemeine Geschäftsbedingungen
このホームページはジンドゥーで作成されました

ジンドゥーなら誰でも簡単にホームページを作成できます。レイアウトを選んだら、あとはクリック&タイプでコンテンツを追加するだけ。しかも無料!
ジンドゥー(www.jimdo.com/jp/)であなただけのホームページを作成してください。

なぜかSサイエンスさんでシルクが表示しなくなってしまいました。
いつものPICとUSB変換ICとEEPROMを載せました。
2018/11/03 簡易画像処理 その3
PSoC5は0.4mmピッチのQFN68ピンです。この形状までは手はんだが可能です。
今回はカメラに付ける基板なので黒い基板にしましたが、OV7675の基板自体が緑だったので意味がありませんでした。
USBコネクタとクリスタル、3.3VLDOを載せただけのシンプルな基板です

基板をスタックすると、こんな感じです。

デバッグは1500円のCY8CKIT-059の「書き込み用のKitProgプログラマー」部分を使います。
純正の書き込み器MiniProg3はとても高価なので使いません。
USBコネクタを後からはんだ付けできるようになっていたら良かったなあと思います。
オス-メスのUSB中継ケーブルでパソコンと接続しています。

このデバッガはSWD(serial wire debug)を選択します。
2線式の通信です。

OV7675は有名なOV7670と違いWEBに使用例が無いのでレジスタを設定するのが難しいです。
微妙にOV7670とレジスタの設定が違います。
カラーバーを表示するのにも0x70 SCALING_XSCと0x71 SCALING_YSCのBit[7]を設定します。
思う
QZSSの運用が開始されました。
ニュースで試作の受信器が2台ほど紹介されていましたが、100万円するそうです。
試作にしては安いなあと思いました。
何でも数が出ないと安くなりません。
日本とオーストラリアだけでしか使えないと数を期待できないんじゃないかなあ。
日曜日の下町ろ..を見ています。
思ってたのと違う方向への展開にどうなるのか期待しています。
2018/11/10 簡易画像処理 その4
簡易的にハイコントラストなラインを検出できないか検討しています。
640×480の画面のなかの2ラインだけをハードウェアでコンパレートして
30fps(33ms)で検出すればフィードバック制御に使えそうな気がします。

カラーバーでのテスト

基準局やっぱりタブレットPC不要バージョン
注文していたのを忘れた頃に基板が来ました。

まあ、最初に作った全部載った基板を分割したような状態になりました。
GPSモジュールを使い分けたり、無線のチャンネル数を増やしたりの色々な組み合わせが可能になりました。
2周波のGPSモジュールでRTCM3を送信するなら920MHzを3チャンネル束ねようかと思っています。
その時にこのCPU基板とFEP01基板3枚を使います。
2018/11/24 M8P基準局 マイコン仕様
基準局でタブレットPCを常時使うのはもったいないのでマイコン仕様に戻しました。
ケースは統一しています。
M8Pはトラ技講習で購入して移植した基板を使っています。

基準局を設置する最初の1回はタブレットPCで座標を決めます。
U-Centerを使っても良いのですが、高機能で設定できることが多過ぎるので専用ソフトを作りました。
UBXのコマンドでM8Pと通信しています。
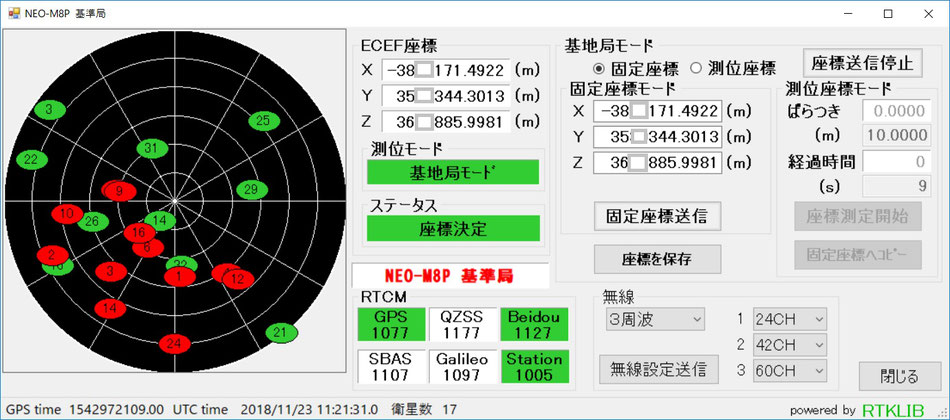
座標が不明で初めて基準局を設置する時には「測位座標モード(SurveyIn)」で測位座標が安定するまで測位します。
座標が安定したらボタンにて固定座標へコピーして、以降は「固定座標モード(Fixed)」で動作させます。
次に電源を入れた時には「固定座標モード」で動作が開始されます。
基準局の設置場所には目印を打ち込んでおき、毎回同じ場所に設置するようにします。
小型なモバイル・バッテリを接続すれば10秒程度でRTCM3を送信するようになります。
思う
凖天くんが多くなったのでM8PでもノーマルなL1信号に対応して欲しいなあ。
GPSとは互換信号だから難しい問題じゃないと思うんだけどなあ。
モノ作りには、松、竹、梅と予算があります。
トラクターが人を検知して停止するには、どんなセンサを使うかでお値段が変わります。
梅コースなら超音波センサを使います。
前4か所、後ろ4か所で4000円ってとこでしょうか。
竹なら画像処理、松ならレーザースキャンでしょうか。
あっ、自分は梅さんがいいなっ。
2018/12/01 M8T基準局 マイコン仕様
M8T基準局もM8P基準局と同じように設置時だけタブレットPCを使うようにしました。
M8TはM8Pと違いRTCM3の出力が無いので、UBX-RXM-RAWX (0x02 0x15)からRTCM3を作っています。
また、デバッグが非常に重いのでVisual Studioのvccで作成&デバッグしてからコードを移植しています。
200KBぐらいのプログラムになりました。変数は動的に確保しているので、19KB+120KB程度です。
rtklib.hで宣言している構造体から不要な部分を削除しています。

構成はM8Pと同じですが、PIC32MZのRAMサイズがM8P基準局のものよりも大きくなっています。

ケースの外観はM8P基準局とシールが違うだけです。

設置時に使用するタブレットPCの画面もM8P基準局と同じです。
ただし、表示される衛星の種類が増えて、GPS,QZSS,Beidou,SBAS,GalileoとStationです。
実際に基準局から送信される衛星はSNR35(dBHz)と仰角25(deg)でマスクされていて、
920MHzの遅い速度でも間に合うようにしています。
SurveyInの処理はタブレットPCで行っています。

RTCM3が送信されているかをRTKLIBで確認しました。

思う
夜空を見上げても星が少ないのに衛星は沢山いて賑やかですね。
寒くなって空気が澄んだのかオリオン座ぐらいは見えます。
F9PがあのSHOPから発売されていました。
欲しいです。とっても欲しいです。しかも2つ。
でも、先立つものがありません。
サンタさんにお願いしたいとこです。
2018/12/08 M8P 移動局(トラクター)
ブロック図はこんな感じです。

基準局も移動局もU-centerを接続できるようになっています。
移動局が無線でRTCM3を受信できているかをU-centerで確認しました。
RXM-RTCMを表示させると、1005,1077,1127を順番に受信しています。

今でも普段は壁ドンで実験をしていますが、なんとかFIXします。
Status 4がFixed RTKです。

M8PはNAV-CFG-NMEAを[CFG-NMEA-DATA2]にしても$GNGGAやNAV-SOLでは座標がcmの単位までしか出力されません。
UBX-NAV-HPPOSECEFかUBX-NAV-HPPOSLLHなら0.1mmの単位まで出力されます。
基準局(トラクター)と移動局のセットです。
基準局(トラクター)は赤い三角印を進行方向にしてトラクター屋根に取り付けます。
傾き角(ロール)検出のために取付方向に指定があります。

いつもの公園で実験をしてきました。
USBの接続がいまいちなので、もう少し丈夫なタブレットPCを使いたいです。


オープンスカイなのでストレス無くFIXします。
狭い公園なのでRTCM3の電波は十分届くし、M8Pは頑張ってFIXを保持してくれます。
画面をキャプチャできなかったので写真を撮りました。

思う
もう今年も残りわずかです。
本当に1年って早いですねえ。
M8Pはハードウェア的に完成しました。
タブレットPCのソフトはのんびりとやります。
今はF9Pに進む準備も進めてします。
2周波なのでアンテナも買わないといけないのかあ。
サンタさんが迷子にならないようRTKのGPSを持たせたいなあ。
2018/12/21 M8T移動局(トラクター)
M8T移動局(トラクター)はM8Pと違いタブレットPCでRTKLIBを実行しています。
移動局のM8TとタブレットPCはPIC32MZを仲介せずにFT4232H経由で直接に接続されています。
基準局からのRTCM3を受信したFEP01TJのデータはPIC32MZでヘッダとフッタを削除してFT4232H経由でタブレットPCへ送信されます。
また、I2C接続の9軸センサはPIC32MZでシリアルに変換しててFT4232H経由でタブレットPCへ送信しています。
計3チャンネルのシリアルがタブレットPCに接続されていることになります。
RTKLIBでは単純にシリアル2チャンネル入力になり、演算結果をTCP Clientとして自身IPアドレス<127.0.0.1>へ出力しています。
上位のVBアプリケーションがTCP Serverです。また、9軸センサのデータをシリアル入力しています。

ケースの外観はM8P移動局とシールが違うだけです。
青色がM8Tです。M8Pの時は赤色です。

思う
年末のせいか戦争関連のテレビ番組がやっていました。
戦艦武蔵の番組を見ました。
貴重な鉄と多くの人を失ってしまう結果でした。
今の時代の人が見ると誰でも誤ったことをしていたなあと思うことでも。
その時を生きていた人にとってはそれが正しいと思ってしまうこともある。
後の世代の人が今を見てどう思うのか知りたいです。
2018/12/27 M8T公園での実験
いつもの公園、M8TセットでRTKLIBのFIXと無線の具合を調べてきました。
三脚は伸ばしていない状態です。

定点でRTKLIBを動作させるとバリFIXします。
仰角マスク30度、40dBHzでも衛星数が18個もあります。

RTCM3の補正データは正常に通信できています。
以前のM8Tでの実験と違いroverからbaseへの$GNGGAの返信が無く、
送信だけをしているので128バイト×14パケット=1.8KB/秒ぐらいのレートが出せます。
RTKLIBでSolustionをX/Y/Z-ECEFでファイルに保存したのですが、
ファイルの読み込みにこのフォーマットが無かったので自作のプロットで確認しました。
roverのRAW出力が10Hz(0,1秒)なのでデータ数1986は約3分間です。
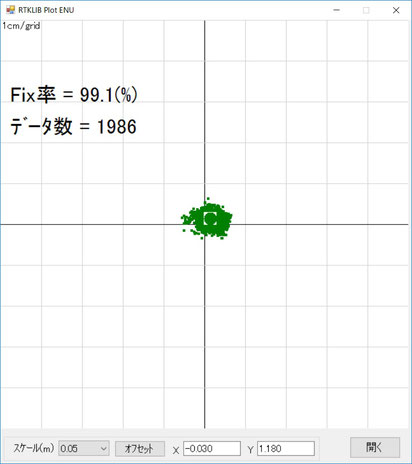
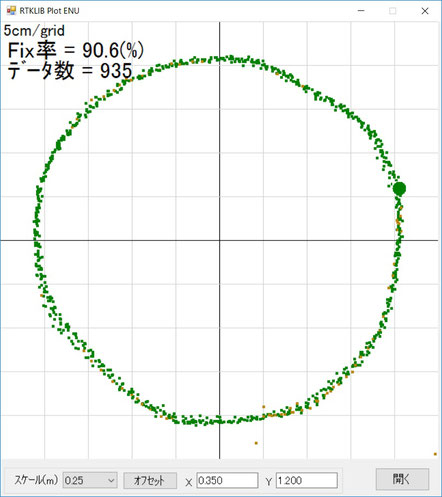
移動するとFIX率がかなり低くなってしまいました。
RTKLIBは衛星数が変わった時にratioが再計算されるようです。
GPSのアンテナを手に持ち、徒歩で移動していたので角度を水平に保てないので特に衛星数が変わりやすいと思います。
でも、おそらくFloatになっていても座標の値は正しそうです。



公園の枯れた芝生の上にハッサクが落ちていたので、タブレットPCでリアルタイムにプロットした座標を見ながら
同じ場所にたどり着けるか遊んでみました。なかなか難しかったです。
FLOATの状態で全然計算が出来ていない時の座標はかなりズレているので、ズレが少ない時には
過去何サンプリングの座標を調べて「FIX座標としよう」ステータスを追加しようと思います。
もう少し突っ込んで、衛星数がなるべく変化しないような処理を追加する。。。
また、singleでの計算座標と2.0m以上違うFLOATの時はsingle座標に置き換えるにします。
思う
下町ろ。。。が中途半端な状態で終わってしまいました。
お正月に番組があるみたいです。期待してます。
原作との違いが気になります。
本、買ってしまいました。
ドラマを見てからなので、登場人物の人間関係が分かるので楽に読めます。
2019/01/03 M8T+RTKLIB位置精度検証 手持ちの材料で料理
新しい年になりました。相変わらずHinjyaな生活をしています。
冷蔵庫の余った食材でチャーハンを作るように手持ちの部材で何かを作ってみました。
基準局にパソコンを置いて、移動局からのRTCM3を受信するような構成です。
基準局のM8T基板はUSBで接続しただけのモノです。


少し軽量に作成した移動局をレールの上で走らせてRTKLIBの演算精度を検証するためです。
重さは2600mAhのバッテリ込みで200gです。
移動局からのRTCM3も0.1秒毎だと5KB/sの送信速度が必要なので2.4GHzにしました。
ここで2.4GHzの送信出力が大きいと1.5GHzのGPS信号の受信に影響が出ました。
そのため、xBeeの送信出力を最小に設定しています。
ある時刻の正確な位置を調べられるようにGPS時計を一緒に撮影します。
昼間の屋外では意味が無さそうですが。。。夕方がチャンスかなあ。you got a chance!
M8NのTIME PULSをCTS信号にしてFT4232H経由で接続しています。

この移動局をけん引するためにトーマスをクリックしました。

GPSシミュレータが2台あれば屋内で実験可能ですが。。。
ひっそりと屋外で実験します。
2019/01/05 M8T+RTKLIB位置精度検証 手持ちの材料で料理その2
クリックした次の日にトーマスがやって来ました。
早速。実験を行ったのですが、冬の夕日はつるべ落としで直ぐに暗くなってしまいました。(TT
時刻はmmssffです。描画高速化のために数字を分割しました。

とっても暗い動画です。
綺麗な女性の説明もありません。

半径215mmのサークルを走らせた場合に水平面でGPSアンテナが早い速度で回転する事になります。
それにより衛星数が変化し易くなります。軽量化のためにチープなアンテナを使っているのも原因です。
でもFloatになっていても実際には正しい座標が多いようです。
3周分の良いとこをプロットしました。
The early bird catches the worm. 朝方に実験した方が良さそうです。
再チャレンジします。
無料の動画編集ソフトを探そう!
2019/01/23 ZED-F9P その1
シリーズ化したサイズ35×40でZED-F9Pの基板を起こすことに決めましたっ!!
モジュール単体での価格を見て驚き、リフローに挑戦する気持ちが固まりました(^^
いつもSサイエンスさんに基板を注文する時はEagleを使っていたのですが、
Eagleでメタルマスクのを出力したことが無かったのでKiCadに移行しました。

LDOにLT1963を使ってたんですが、値段が高くなってしまったので3端子タイプに変更しました。
出力電流が大きいのを選らんだのは、この基板から他の基板へ電源供給が可能になるようするためです。
USBもマイクロにして、バックアップもリチウム2次電池へ変更。
アンテナ入力もU.FLコネクタにしました。
スペースの関係で信号が90度曲げになっちゃいました。
920MHzで2周波のRTCM3を半径1km以上に飛ばします。
hinjyaなんですが頑張ってみます。
hinjyaでも高精度測位したいのです。
思う
昨日まで200万円で売られていた自動車が、ある日突然2万円になった!!
そんな信じられないことが起こったんです。ありえんことです。
もっと高い値段で売っても良かったんじゃないかなあと思いますよ。本当に。
安くすることで数が多くなり、より安くなる。消費者思いの優良メーカですねえ。
メーカの本気度が名前にも出ています。
ZEDのネーミングには、もうこの後の機種が無い、完成された最終形を感じます。
変更するとしたら処理速度ぐらいです。全衛星種時に20Hzを要望します。
でも、これは時間が難なく解決します。
凄いぜ、ZED-F9P!
2019/02/02 ZED-F9P その2
基準局のボックスを作り始めました。

また、組み込みCPUのソフト、設置時に使用するタブレットPCのソフトを作っています。
見本用に注文したSパークファンの基板が手元になかなか届きません。
2周波の激安アンテナ、無線モジュール。。。
毎月少ししか部材を購入できません。
優先順位を決めて、やっていかなければなりません。
もしも~お金があったなら、思いの全てをモノにして君に見せることだろう。
だけどぉ僕にはお金が無い。君にぃ聴かせる〇〇もない。
という事情です。
MH研究所(えむ・えいち・けい)のマークを作ってみました。

思う
ラジコンのオートバイにMPU9250と4つのTOF距離センサを載せて
バンク角を測り、2.4GHzでリアルタイムにパソコンへ送信してみたいなあ。
MPU9250へ動的に加速度が加わった時のクオータニオン出力を評価してみたい。
と思ったんですがラジコンのオートバイって高いんですねえ。
2019/02/06 バンク角 その1
距離センサの誤差1mmがあるのでアバウトに2次式で近似しました。

片側に2個のセンサがある理由は旋回中に遠心力の分力でサスペンションがボトムすることを考慮しています。
加減速度と遠心力が無い状態で傾けて5度間隔の距離をティーチングして
直線補間してもそこそこ使えそうな予感がします。
旋回中の2輪のラジコンには重力,加減速度,遠心力が複雑に絡んでいるので結果が楽しみです。
2019/02/11 バンク角 その2
センサの取り付け位置を妄想しています。

0度と45度のセンサを樹脂パーツにねじ止めして、それをどうやってボディに固定するのかが問題です。

ZED-F9P その3
F9Pへ進むことになったのでタイトルを変更しました。
hinjyaのRTK になりました。英語では RTK of Hinjya です。
ですが、I'm sorry. This home page is Japanese only. です。
アンテナ。。。問題ですねえ。
モジュールの販売と同時にアンテナを準備していなかったのは失敗です。
まあ、基準局のアンテナはブラック・プリン型を使うことにしました。
このアンテナはDEBESOなので固定を考えないといけません。
軽量な安いグランドプレーンを作ることになりました。

思う
図面を描くだけならhinjyaでもできるのですが、モノ作りにはお金が必要です。
たしかにクリックするだけで世界の彼方からモノが飛んで来るのですが
国内の通販のようにスムーズにはいきません。
2019/02/12 ショックな出来事
赤い基板のF9Pを引き取りに行ったのに、違うやつだった。
なぜかM8Pでした。
とっても、とっても落ち込んでいます。
2019/02/15 不撓不屈(ふとうふくつ)
MH研究所(えむ・えいち・けい)は不撓不屈の精神をもってコトにあたります。
3万円と時間を落としてしまったけど、黒い小さなF9Pを注文いたしました。
グランド・プレーンを眺めながらソフトでもつくるかなあ。
2019/02/22 ねこの日
このところinvoiceの嵐です。はあ。
グランド・プレーンは完成したのですが、アンテナがやってきません。
ZED-F9P用のソフトはM8Pをベースに作っています。
今週は暖かい日が多くて、梅の花が満開になっていますね。
まだ虫さんも出てきていないのに咲く梅の花が好きです。
2019/02/24 ZED-F9P その3 基準局用のアンテナ・ベース板
ZED-F9P基準局用のアンテナ・ベース板です。
板に空いた穴が水平ポールからオフセットされるように取り付けてあります。
そのままセンタではDEBESOが干渉します。

裏面には下振りの糸が垂れています。
何故、下にも板があるかというと
それはですね、ベランダで実験する時なんかにペタっと置きたいからです。
2枚構成になっていると地べたに置くことも可能になるのです。
たいしたコトじゃあないけど便利です。

M8Pを使ってデバッグをしています。

思う
普通に日本のAマゾンをクリックするように海外の品物が購入できたら便利なのになあ。
国を超えると関税がかかったり、国によって禁止されている品があるので壁が高いのかなあ。
トラブルの処理がめんどくさいのかなあ。
今って1ドル110円ぐらいです。
何年か前に物凄く円高な時がありました。
hinjyaは円高になると安くモノを買えるので大変嬉しいです。
2019/03/16 ZED-F9P その4 遅い春
やっとSパークファンさんの赤いやつがやって来ました。

隣にあるのは自分の起こした基板です。
まだリフローの予定が立っていません。
モジュールもゲットできそうにあません。
USBがCタイプなので100円ショップでケーブルを購入してきました。
思う
エンジニア・サンプルをゲットしておくべきでした。
日本はなんて部品の入手性の悪い国なんでしょう。
アンテナが来ません。
でも安くてちょうど良い大きさのが無いんです。
エフナイン アンテナ無いと 一周波
字余り
2019/03/23 ZED-F9P その5 基準局用プログラム

基本的にはM8Pと同じでZED-F9Pの Survey-In 機能を使用します。
UBX のコマンドが少し変更されたようで、NAV-SOL,NAV-SVINFO が無くなっています。
衛星の色は、GPS:緑,Beidou:赤,Glonass:紫,Galileo:青,QZSS:白です。
2019/03/23 ZED-F9P その5 2周波アンテナ
2周波のアンテナは繊細です。
壁ドンの状態で使うと利得の低い1周波になってしまいます。
初めて通電した時に壊れているのかと思ってしまいました。

オープンスカイを求めて、久しぶりに公園へ行って来ました。
今年はまだ桜がちょこっとしか咲いていませんでしたが
寒い中でもお花見をしているファミリーがいました。

もう1つのモジュールもやってきました。
これでローバーとベースのセットになりました。

思う
C国の賃金は時給330円からだそうです。
沢山の頭の良い人達が設計して、とんでもなく安い労働力で製品を作ってしまいます。
SニーのC国携帯工場が人件費が高いので閉鎖して、より人件費の安い国へ流転しました。
C国のモノ作りはスピード感とアグレッシブさを感じます。
見習うところもあるんじゃないかなあ。
2019/04/20 M Motor Cycle プロジェクト その1
FIJON FJ913 をクリックしました。
なんと1/5スケールのオートバイのラジコンです。
そしてフロントにはディスク・ブレーキが付いています。

9軸センサとバンク角センサ、アンチロック・ブレーキとか色々と実験をするためのサイズです。
今は、倒立フォークにどうやって車速センサを取り付けるかを悩んでいます。
2019/04/28 M Motor Cycle プロジェクト その2 9軸センサ
今まで9軸センサにMPU-9250を使っていましたが、
新規設計には向かないので見切りをつけて別のセンサにしました。
このセンサもMCU内臓で quaternion や euler angles を出力してくれます。
また、yaw のドリフトが完全に抑えられています。

しかし、pitch か roll が45度を超えると yaw が異常値を出力するようになります。
おそらくコスト削減のため三角関数の演算が残念なことになっていると思います。
対策は quaternion から euler angles を再計算することです。
センサとI2Cで通信しているMCUは64bit FPU内臓なので簡単、高速に処理をしてくれます。
このセンサのI2Cは内臓MCUがソフトで処理を行っているようで、やたらSCL信号をLOWにしてきます。
8bitデータの後のACK出力までに500usかかることもあります。
その辺をソフトで対応しておかないと正しくデータを取り込めません。
9軸センサは主にAndroidに作らてれいます。
I2Cを制御するMCUが高性能なので、そちらで何とかすることが可能なので
この仕様になったのかな。
2019/04/28 ZED-F9P その6 2周波アンテナ純正品
2周波アンテナの純正品です。

やっとアンテナ込みで2セット揃いました。
あ~~長かった。
基準局は大きなアンテナでも良いけど、移動局は小さい方が良いです。
2019/05/02 M Motor Cycle プロジェクト その3 プロジェクト構想図
こんな感じで構成しています。

1.プロポの右スティックで車速とステアリングをコントロールして
左スティックでブレーキをコントロールします。
2.車体のセンサと制御のデータは2.4GHzでパソコンへダウンリンクします。
3.リアの車輪速センサと9軸センサから推定した仮想車体速の差からタイヤのスリップ率を計算して
モータESCへの制御を行い、低ミューな路面でも加速時がスムーズになるようにします。
4.フロントの車輪速センサと仮想車体速からタイヤのスリップ率を計算して
フロント・ブレーキのロックを防ぎます。
5.9軸センサの動的なデータの検証用に4chのTOF距離センサを使います。
6.ステアリング・サーボについては。。。まだ未定です。
実車のオートバイは車体を傾けると旋回するんですが、
その時にはハンドを旋回方向に曲げようと意識していません。
車体を傾けると勝手にハンドルの位置が決まるんです。
しかし、このラジコンはハンドルを切ることで車体を傾けるので逆なんです。
操作が大変難しそうです。
思う
組み立て中に感じたことは「何てクオリティが高いんだ!しかもこのお値段で」です。
細かな場所にも Fijon の文字が入っています。
アルミとカーボンで作らています。
欲を言うなら、バネ下にモータがあるのとリアサスにリンクが1つあれば良かったかな。
ベルト・ドライブのテンションの問題と、ラジコンでも実車の特許が影響するのかが疑問です。
リアのサスは良い感じですが、フロントはバネが無くてダンパーのみってセッティングです。
早く走らせたいのですが、まだサーボとモータがありません。
2019/5/11 近況
サーボとモータは取り付けました。
マイコンのソフトを製作中です。
イメージとしてはhttps://www.kawasaki-motors.com/mc/lineup/ninjazx-10r/の hinjya マシンにしようと思ってます。
イメージカラーはライムグリーン。
電子工作は得意だけど、模型作りは今一つなので、どうなるやら。
ネットでオートバイを見たらhttps://global.yamaha-motor.com/jp/profile/technology/electronic/001/がありました。
かぶってるじゃん。でも高そうだなあ。
トラクション・コントロールとアンチロックは必要だけど、それ以外の制御って意思の疎通がとれるのかなあ、オートバイと。
エンコーダのスリットも作ってますが、取り付けが難しいです。
ZED-F9Pは無線経由で壁ドンでもFIXしました。1周波ですけど。
移動局のアンテナは1周波を使っています。基準局に純正品。
黒プリン型アンテナは壁ドンに弱いのです。
u-bloxの純正アンテナは壁ドンでも使えます。マルチパスに強いってことかな。
ZED-F9Pの後継が早くも発表されました。
1年後ぐらいかと思っていたのに、20Hzと思っていたのに。
IMU込みで。
驚きの3重奏です。
次は絶対にエンジニアサンプルをゲットするぞ!
2019/05/25 M Motor Cycle プロジェクト その4 エンコーダ板
フォト・インタラプタは30円のコレを使っています。

コネクタが無いので線材を基板に直接ハンダ付けしています。
また、充填材に速乾性の木工用ボンドを流し込むとイイ感じになります。

このセンサは0.5mmのスリット幅になっているので、透明シールに分度器のように印刷したものを
アクリル板に貼ってみました。
がっ、インクが薄くてセンサが反応しませんでした。
幅を倍の1mmにして、印刷濃度をマックスにしてもダメでした。
透明シールに印刷では無理だという結果になりました。
白いシールに印刷して透過する箇所をカットすれば可能っぽいですが
手作業でのカットはしんどいのでしたくありません。
エンコーダ・プレートが市販されてますが、高価でサイズも小さいのです。
金属板をエッチングしてもらうのも高価です。
1400円のエンコーダを買って分解するのもイマイチです。
白に印刷して反射型を使うしかないのかなあ。
屋外で反射型は大丈夫か心配です。

デバッグはプロポからの前進指令から周波数を計算してアウトプット・コンペア出力の
タイマ周期を変化させてパルスを作っています。
この信号をフロント・センサのインプット・キャプチャ入力へ接続しています
インプット・キャプチャ入力のパルス周期と歯数(P/R)とタイヤ周長(mm)から
車輪速(km/h)を計算しています。
周期換算なのでパルスの入力が無くなった時を判断するためにタイマを1つ使用しています。
とりあえず0.3~30(km/h)の速度を見込んでいますが、最高速度は不明です。

フロントはフローティング・ディスク構造になっています。
キャリパーをスライドさせるよりもディスクをスライドさせる方がシンプルになります。
タイヤは本体とは別に1/5サイズのラジコン用としてホイールが接着されて売っているのですが
ハブの取り付け穴位置がズレています。
前後のタイヤ2本で安い軽自動車用タイヤ4本が買えてしまします。
2輪はタイヤが命です。
microchipのpicはルネサスのrxと違い、キャプチャ系のカウンタにタイマを使用しています。
1つのタイマ・カウンタを複数のキャプチャに使用できるのは便利なこともあるけど、
キャプチャ1つに1カウンタあった方が良いなあと感じました。
思う
「縁が無かった」と思うことがあります。
2019/06/03 M Motor Cycle プロジェクト その5 hinjya号
色々とやってみたのですがインクジェットで遮光する方法が有りませんでした。
感光基板用のフィルムも4枚重ねで試してみましたがダメでした。
センサの投光LEDの抵抗を大きくして光量を絞ってもイマイチでした。
赤外の波長に対して無力な黒色でした。
銀色は金属粒子を使えば良いんだけど、インクジェットのノズル径よりも大きくて
穴を通らないらしいです。
インクジェットから銀色を打ち出せたら用途があると思うんだけど。。。残念です。
金属粒子を蒸着させたテープがあったので、カットしてアクリル板に貼りました。
精度が全然無いので、入力にフィルタ掛けるので応答が悪くなってしまいます。
通販でフォトインタラプタはたくさん売っているのに
エンコーダ・プレートは小さいのが数種類しか売っていません。
お金に余裕ができたらフォトエッチングを頼もうと心に決めました。

透明のボディに色を塗る時に、表からか裏から塗るかで迷いました。
今回は、濃ゆい緑色を裏から塗りました。
薄い色は光が透けた時に塗った厚みの差が色ムラに見えてしまいます。
エアー・ブラシを探せば何処かにしまってあったんだけど
探すのがめんどいので刷毛塗りしました。
すっごい近くでガン見しなければ、綺麗に出来上がったと自己満足120%です。

緑のカウルに黒いツナギ。
hinjyaのイメージ・カラーです。
かえってライム・グリーンより、濃ゆい緑色の方がhinjyaっぽくて良かったと思います。
ステッカーもシンプルに。
hinjya号のコンセプトは「隠密」なのです。
思う
いつも基板を依頼していたSサイエンスさんがPCBの受注を辞めてしまいました。
今ではC国の基板メーカのホームページも日本語化されていますが
Sサイエンスさんが日本とC国との懸け橋的なことをしてくれたおかげで
英語がダメな自分でも安く基板を起こすことができました。
大変感謝しています。ありがとうございました。
自分からみると日本製は高過ぎることが多いです。
フォトエッチングにしてもC国に頼めば安くできるのになあ。
5月の末にエンコーダ板を基板で作ろうとしてSサイエンスさんに注文しました。
長穴をスリットにした丸基板です。
基板としての正しい使用方法ではないのですが、
安く、精度良く、手軽に注文できる方法が他になかったのです。
基板以外の金属加工品も簡単に注文できる方法が確立されることを願います。
言葉と物流のボーダレスな世界が早く来ないかなっ。
2019/06/22 M Motor Cycle プロジェクト その6
最後にSサイエンスさんへ注文したエンコーダ板基板を取り付けました。


パルス出力をオシロで確認すると、完璧な出来栄えでした。
144P/Rです。

ロードランナーみたいなモノを作っています。
リア・タイヤのローラーの回転をベルトでフロント・タイヤのローラーに伝える仕組みです。
ローラーの上で自走可能になります。
だたし、加速度や減速度が車体に加わらないのでアンチ・ロックやトラクション・コントロールのデバッグには使えません。
時間があったら、たいした動力ではないので、モータの回転からトランジスタの熱に変えて動力計にしてみたいなあ。
2019/06/28 M Motor Cycle プロジェクト その7 走行抵抗ゼロ
走行抵抗ゼロの状態での応答性です。

黒:スロットル信号 紫:リア車輪速 横軸1秒/グリッド
あまりにも鈍い応答です。
安いコントローラなのでパラメータのチューニング機能が無いんです。
過激なスロットル・ワークをすると、直ぐにオーバー・ロードで保護モードみたいになっちゃいます。
2輪はいきなりトラクションが抜けると危険な状態になる度合いが4輪より大きいんです。
まあ、優しく、優しくスロットルを上げましょう。
走行抵抗を調べたいんだけど、クラッチやギヤが無いのでニュートラルで惰行走行できません。
何か小さな電磁クラッチがないかなあ。

台風の影響か、G20の影響かは不明なのですが、ローラー冶具用のアクリルの到着が遅いです。
安く作るためにローラーは削り出しを避けて、壁紙を貼る時に使うベアリング入りのジュラコン製を
バラして使っています。流用ってのも重要なことです。
ゴムの詰まったタイヤに車重が軽いのでスプリングで下から引っ張ってローラーに押し当てないといけません。
尚且つ、車速ゼロになった時に転倒しないように上から紐で吊るす必要もあります。
最近、よく見ないでAマゾンで注文すると海外からの発送があります。
これも納期が掛かるので注意しないといけません。はい。
2019/07/02 M Motor Cycle プロジェクト その8 距離センサとローラー治具
左右に2個づつ距離センサを取り付けて、9軸センサの角度出力を評価しようとしています。
とりあえず、右側に2個のセンサの取り込みを確認しました。

距離センサは VL6180X を4個使用します。
VL53L0X のレーザー出力2mレンジに比べて、赤外LED出力150mmレンジになっています。
レジスタはレンジが違う程度ではなく、まったく別ものになっていました。
例のごとく、サンプル・コードを元に足回りを変更しました。
複数のデバイスを接続した時にI2Cのスレーブ・アドレスを設定できそうなのですが、
8-channel I2C-bus multiplexer PCA9547D を使って制御しています。

ローラー冶具です。
上下からスプリングでテンションをかけていますが、前に飛び出しそうなので後ろからも引っ張る予定です。
プーリーとタイミングベルトが迷子になっています。
デバッグ中は配線が絡まっています。
思う
七夕が近いのでレンタルDVD屋さんに小学生の書いた短冊が飾ってありました。
最近の小学生の願い事に興味が沸きチラッと見てみると戦隊ものの何かが書いてありました。
クリスマスじゃないんだから、欲しい物を書くのもなあ。。。って思いました。
自分の今の願い事は「迷子のプーリーとベルトが見つかりますように」です。
2019/09/14 3馬力 プロジェクト その1
350W/36VのBLDCモータ基板と6枚を制御するコントロール基板です。
手ハンダするのでGNDパッドに穴を開けています。

3馬力弱あります。
PWM信号で回しますが、速度フィードバックも考えています。
基板を何処に頼むのかが問題です。
予算は基板と電子部品で2.5諭吉でしょうか。
インホイールのモータ$73×4で4輪駆動、他の仕事をするモータが2個付きます。

ボディも入れて全部で8諭吉ぐらいかあ。
誰か援助して欲しいです。
2.4Gのラジコンとオートパイトットで走行するシステムです。
思う
最近、貧者暇無しの状態で、M Motor Cycleのソフトに手を付けていません。
ソフトって細切れな作業をするのがダメなとこがあって、一気にやらないといけません。
っても、趣味でやっているので時間に限りがあります。
市内の科学館がリニューアルしたので見に行ってきました。(^^/
地元感があって楽しい展示が多かったです。
でも子供を相手にした展示には注意が必要だなあと思いました。
ケガの無いようにするのは当然ですが、子供は遠慮を知らないから
展示物が壊れないようにしなければいけません。
また、壊れた個所を直ぐに修繕することも大事です。
平日だったので空いていましたが、週末には展示コーナー毎に先生達の解説があって
賑やかなんだろうと思いました。
2019/09/16 3馬力 プロジェクト その2
基板ラックです。

板金で作る時にカットと穴あけはレーザーでしてくれるので安いのですが、
曲げがあると途端に高くなります。
仕方ないのでアングルで板を繋ぎます。
FETの損失は、ざっくり計算すると
4km/h,duty50%で2.5Wになりました。
1枚で6個のFETで6枚あると90Wにもなってしまいます。
オン抵抗が49mΩもあるのがいけませんが、耐圧が高いので諦めます。
銅バーで放熱しようかと思っています。
ローバーの妄想図です。

思う
PAYPALしなくても基板とか色々頼めるようになったら楽ちんなのになあ。
2019/09/27 3馬力 プロジェクト その3 rover2019
ローバーの図面が出来上がりました。
各部品を作ってから組図にして穴位置をチェックします。

車幅を狭くしたかったので横転しないか心配です。
タバコの箱分の最低高です。
最低高と横転のトレードオフです。
セニアカー用のバッテリを3個積みます。
長時間働くにはバッテリが重くなり、バッテリ移動装置になっています。
安くするにはアングル戦法です。
紙の箱の「のりしろ」部分をアングルに置き換えてネジ止めします。
そしてアングルの接地面にシリコーンを塗ると完全防水になり。。。ません。
どうしても隙間が残ってしまった所があって、シリコーンを充填することになりました。
バッテリを積んでも水に浮くような計算です。
っても水陸両用ではありません。。
操舵装置は無く、左右の回転差で曲がります。
戦車のキャタピラと同じです。
その場で回転が可能です。
適度にミューの低いオフロード向けのローバーです。
結局、基板はFusionPCBでPaypalしました。
4層基板70×60 10枚で$47.90 USD
4層基板70×150 5枚で$103.91 USD
最低枚数が5枚なので面付けしなかったけど、その方が安かったかなあ?
予算を少しオーバーしましたが、こんなもんです。
支払いから1週間で出荷、輸送に3日になりました。
FETの損失は、低抵抗のものに変更しました。
13mΩにしたら36個で23.4Wまで減りました。
放熱バーが不要になりそうです。オン抵抗が物を言いました。
もっと抵抗の低いのがあったんだけど、あやしそうなメーカだったのでヤメました。
毎月少しずつ部品を買っています。
10月はインホイールモータを狙っています。11月で板金です。
冬が迫ってきちゃいます。
2019/09/28 3馬力 プロジェクト その4 基板

DRV8320SのBLDCモータドライブ基板です。
今回は抵抗とコンデンサを1005Mサイズにしました。
正直、手ハンダで予備を含めて7枚作るのはと~てもしんどかったです。
チップ部品を手ハンダする時は、まず片側をハンダしてから反対側をハンダします。
んがっ、初めにハンダした側がしっかり付いていないと反対側をハンダする時に
チップが立ち上がってしまいます。
よく言う「マンハッタン」です。
まあ、なんとかフラックスの力を借りてハンダ付けが終了しました。
自分に言ってあげます。「お疲れ様です」と。
電流は10Aなので銅箔厚35μで10mm幅なのですが、4層基板の内の2層を使ってるので
5mm幅以上を確保しています。

PIC32MZのBLDCモータ制御基板です。
PIC32MZの144ピンとMAX10の一番小さな02を載せています。
PIC32MZの144ピンはピンのピッチサイズが0.5mmと0.4mmがあります。
注意しないといけません。
間違って注文してしまい、A月電子さんへ急遽注文しました。
PIC32MZはSPI通信とPIOで6chのDRV8320Sを制御します。
MAX10は速度カウンタを6ch作ってSPI通信でPIC32MZと接続しています。
PIC32MZはカウンタ周りが弱いのでFPGAで補っています。

基板を合体させた写真です。
本当は330uFのコンデンサを載せたかったのですが、基板の間隔を15mmにしたので
150uFに小さくなってしまいました。
<思う>
近所の100均へ行ってきました。
消費税が2%高くなっていて110円になってしまいました。
でも、円安になると簡単に高価な部品代のインボイスが高くなります。
なんとかならないのかねえ。
2019/10/19 3馬力 プロジェクト その5 インホイールモータ
aliexpressからの購入がめんどうなので、国内通販で「バランススクーター10インチ」を2台買ってバラすことにしました。


タイヤがオンロード向けなのが残念です。
でも暫定で動作させるためのリチウム電池も取り出せるし、動作済みの回路でモータへの信号も調べる事が出来るので
嬉しいです。
思う
なぜ?日本からだとaliexpressへpaypalできないんでしょうか。
中国にはお宝が沢山あります。
もっと手軽に海外通販が可能になって欲しいよう。